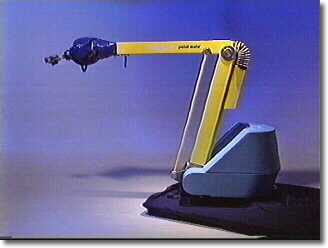
PM-1 robotsystem Specifications
Manipulator
| Number of axes: | 6 as standard (3-8) |
| Wrist (Hand): | Payload 10 kg (200 mm from end of wrist) |
| Main axes: | Absolute balanced |
| Max speed TCP | 2 m/s |
| Repeatability: | +/- 0,5 mm |
| Weight: | 250 kg |
Control system
| Number of axes: | 6 as standard (3 to 8) |
| Programming method: | Lead through, Point To Point Teach, Point To Point (PTP) and Off Line. May be mixed. |
| User Interface: | Teach Pendant or LCD (TFT) colour screen. |
| Queue System: | Mixed Queue or Batch (series) |
| Object Identification: | Manual or automatic |
| Synchronisation: | Internal or external via encoder |
| Program optimisation:(Editing possibilities) | Programmed path, Program speed, colour on/off, colour flow |
| Diagnostic and survey: | All the robot functions including colour flow. Possible via Internet. |
| Power Supply: | 230V / 1,2 kW |
Hydraulic Unit
| System pressure | 70 bar |
| Sound Level: | 72 dBA |
| Power Supply: | 3x 400 V /16A |
| Effect | 5,5 kW |
| Weight: | 190 kg |
| Measurements: | 980x650x600 mm (height, width, depth) |