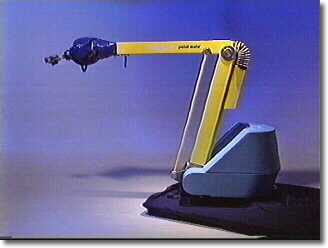
PM-1 robotsystem spezifikation
Manipulator
| Anzahl Achsen | 6 als Standard (3-8) |
| Hand: | Traglast bis zu 10 kg (200 mm von der Hand) |
| Hauptachsen: | Vollkommen ausbalanciert |
| Werkzeug- geschwindigkeit: | max 2 m/s |
| Wiederholgenauigkeit: | +/- 0,5 mm |
| Gewicht: | 250 kg |
Steuerungssystem
| Anzahl Achsen: | 6 als standard (3 to 8) |
| Programmierart: | Lead through, Point To Point Teach, Point To Point (PTP) and Off Line. Kombinierbar. . |
| Bedienerschnittstelle: | Handterminal oder Bildschirm (Farbe). |
| Warteschleifensystem: | Gemischte Warteschleife oder Serie (Batch) |
| Objektidentifizierung: | Automatisch oder manuell |
| Synchronisierung: | Intern oder über Encoder |
| Produktionsoptimierung (Editiermöglichkeiten) | Programmgeschwindigkeit, programmierte Bahn, Farbe zu/von und Farbfluss |
| Diagnose/ Überwachung | Sämtliche Roboterfunktionen einschließlich Farbfluss. Auf Wunsch per Internet. |
| Speisung: | 230V / 1,2 kW |
Hydraulikaggregat
| Systemdruck | 70 bar |
| Geräuschpegel | 72 dBA |
| Speisung: | 3x 400 V /16A |
| Leistungsverbrauch | 5,5 kW |
| Gewicht: | 190 kg |
| Abmessungen: | 980x650x600 mm (Höhe, Breite, Tiefe) |