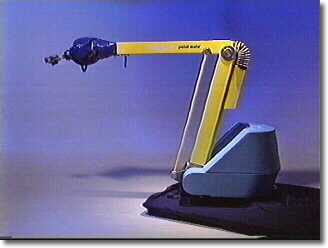
PM-1 robotsystem Specifikation
Manipulator
| Nombre d’axes | 6 en version standard (3-8) |
| Poignet: | Peut porter jusqu’à 10 kg (200 mm du poignet) |
| Axes principaux: | Parfaitement équilibrés |
| Vitesse d’outil: | 2 m/sec |
| Exactitude dans la répétabilité: | +/- 0,5 mm |
| Poids: | 250 kg |
Système de commande
| Nombre d’axes: | 6 en version standard (3 to 8) |
| Méthode de programmation: | Lead Through, PTP-teach, PTP, Off Line – peuvent être combinées. |
| Interface de l’opérateur: | Terminal à main ou écran (couleurs). |
| Système de file d’attente: | Mise en attente combinée ou sérielle (batch) |
| Identification des objets: | Automatique ou manuelle |
| Synchronisation: | interne ou externe par codeur |
| Optimisation de la production: | Vitesse de programmation, trajectoires programmées, couleurs de/à (possibilité d’ajustement) et débit de la peinture |
| Diagnostic/contrôle: | Toutes les fonctions robotisées, y compris le débit de la peinture. Par l’internet si souhaitable. |
| Alimentation: | 230V / 1,2 kW |
Groupe hydraulique
| Pression: | 70 bar |
| Niveau sonore: | 72 dBA |
| Alimentation: | 3x 400 V /16A |
| Puissance consommée: | 5,5 kW |
| Poids: | 190 kg |
| Dimensions: | 980x650x600 mm (hauteur, largeur, profondeur) |